INTRODUCTION TO EMBEDDDED SYSTEMS 2
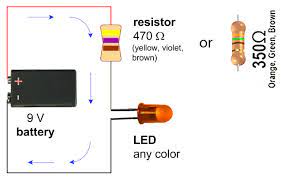
A basic electrical circuit consists of a power source, a resistance element and a ground.They operate under the Ohm's Law which states that resistance is directly proportional to the voltage drop across it but inversely
proportional to the current flowing through it.
To demonstrate a simple electrical circuit, we'll use an external LED, 470 Ohm resistor (to regulate the current) ,a 9 Volt power source(battery) and a push button to light up an led.
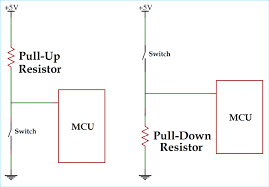
The next step is toggling the led using a push button which will teach us how to use a GPIO pin as an input pin. Its code is as shown below: (Uploaded to Raspberry Pi Pico W)
from machine import Pin
from time import sleep
#initialize the led Pin and Button Pin
led=Pin(0,Pin.OUT)
Button=Pin(10,Pin.IN)
#Make the led off initially
led.value(0)
while True:
#Check if button has been pressed.
if Button.value():
led.value(1)
else:
led.value(0)
#Delay to ensure the is enough time between button presses to prevent
#the led from flickering as it reads the button state too quickly.
sleep(0.3)
#In this project, we'll use a button to toggle btwn snake lights, binary counter and traffic lights
from machine import Pin
from time import sleep
button_state=0
btn_Pn=Pin(10, Pin.IN, Pin.PULL_DOWN)
red=0
yellow=2
green=3
Led1=Pin(red,Pin.OUT)
Led2=Pin(yellow,Pin.OUT)
Led3=Pin(green,Pin.OUT)
def Snake_lights():
print("------------------- ")
arr=[red,yellow,green]
i=0
T=0
while True:
led=Pin(arr[i],Pin.OUT)
led.value(1)
sleep(0.5)
led.value(0)
i=i+1
if i==3:
i=0
T=T+1
if T==3:
Led1.value(0)
Led2.value(0)
Led3.value(0)
print("Snake Lights done ")
print("------------------- ")
break
def Binary_Counter():
print("------------------- ")
Binry=[0,0,0]
T=0
while True:
for x in range(8):
Binry[2]= x%2
x=x//2
Binry[1]= x%2
x=x//2
Binry[0]= x%2
x=x//2
print(Binry)
Led1.value(Binry[0])
Led2.value(Binry[1])
Led3.value(Binry[2])
sleep(0.5)
Led1.value(0)
Led2.value(0)
Led3.value(0)
sleep(0.5)
print("------------------- ")
T=T+1
if T==1:
Led1.value(0)
Led2.value(0)
Led3.value(0)
print("Binary Counter done ")
print("------------------- ")
break;
def Traffic_Lights():
print("------------------- ")
T=0
while True:
Led1.value(1)
Led2.value(0)
Led3.value(0)
print("STOP ")
sleep(5)
Led1.value(1)
Led2.value(1)
Led3.value(0)
print("HOLD ON ")
sleep(1)
Led1.value(0)
Led2.value(1)
Led3.value(0)
print("WAIT ")
sleep(3)
Led1.value(0)
Led2.value(1)
Led3.value(1)
print("ALMOST ")
sleep(1)
Led1.value(0)
Led2.value(0)
Led3.value(1)
print("GO! ")
sleep(3)
Led1.value(1)
Led2.value(0)
Led3.value(1)
print("START BRAKING ")
sleep(1)
T=T+1
if T==1:
Led1.value(0)
Led2.value(0)
Led3.value(0)
print("Traffic Lights done ")
print("------------------- ")
break;
def disp_project():
n=0
while True:
if btn_Pn.value():
if n==0:
print("------------------- ")
print("BUTTON PRESSED ")
print("Snake Lights ")
Snake_lights()
if n==1:
print("------------------- ")
print("BUTTON PRESSED ")
print("Binary Counter ")
Binary_Counter()
if n==2:
print("------------------- ")
print("BUTTON PRESSED ")
print("Traffic Lights ")
Traffic_Lights()
n=n+1
if n==3:
n=0
sleep(0.3)
disp_project()
A sensor is a device that detects a physical parameter and converts it to electrical signals that convey information about the parameter.Some people refer to sensors as special actuators which only produce electrical output.There
are different types of sensors each differentiated by what it detects e.g soil moisture sensor,light intensity sensor e.t.c
An actuator is a device that receives electrical signal input and converts it to another form of energy such as such as mechanical energy e.g a motor converts electrical enegy to mechanical energy. Actuators are usually
used to perform an action after receiving an electical input e.g from a sensor , microcontroller or just a power source.
Before incorporating sensors into our projects, we need to understand the following terms:
from machine import Pin,PWM
from time import sleep
ledPin=PWM(Pin(26))
ledPin.freq(1000)
ledPin.duty_u16(0)
duty=0;
diff=1000
while True:
if duty > 65536 :
duty=65536
diff*=-1
sleep(0.1)
if duty < 0:
duty=0
diff*=-1
sleep(0.1)
print(duty)
ledPin.duty_u16(duty)
duty+=diff
sleep(0.01)
This is a sensor that sends a pulse and measures the time it takes for it to be received back as an echo and uses this time value together with the speed of sound to calculate the distance
The following shows the Micropython code used
to read distance and display it on an OLED:
from machine import Pin,PWM,SoftSPI
import utime
#Initializw the OLED display
spi = SoftSPI(baudrate=500000, polarity=1, phase=0, sck=Pin(14), mosi=Pin(13), miso=Pin(12))
dc = Pin(6) # data/command
rst = Pin(5) # reset
cs = Pin(15) # chip select, some modules do not have a pin for this
display = ssd1306.SSD1306_SPI(128, 64, spi, dc, rst, cs)
Trig=Pin(3,Pin.OUT)
Echo=Pin(2,Pin.IN)
#Setting the LED pin to simulate an analogue output using PWM
LED=PWM(Pin(26))
LED.freq(1000)
LED.duty_u16(0)
#Calibrating the maximum distance your sensor can measure, this value will change depending on your sensor.
max_Ultrasonic_distance_cm=205
#Raspberry Pi Pico has a PMW duty cycle ranging from 0-65025
max_12bit_value=65025;
def read_distance():
#Make the oled display nothing initially
display.fill(0)
#Sending a pulse
Trig.value(0)
utime.sleep_us(2)
Trig.value(1)
utime.sleep_us(5)
Trig.value(0)
#time between pulse release and its arrival as an echo.
while Echo.value()==0:
travel_time=utime.ticks_us()
#time during which the echo is detected
while Echo.value()==1:
pulse_received_time=utime.ticks_us()
timeTaken=pulse_received_time-travel_time
distance=((0.0343*timeTaken)/2)
#Display on oled
display.text("Distance - "+distance+" cm away. ",1,1,0)
#display on terminal
print("The distance object is ",distance," cm away ")
#To prevent brightness values being higher than 3.3 volts
if distance>max_Ultrasonic_distance_cm:
distance=max_Ultrasonic_distance_cm
#Make the brightness value directly proportional to distance of object
#Also mapping the distance value to an analogue value(0-65025)
brightness=(max_12bit_value/max_Ultrasonic_distance_cm)*distance
LED.duty_u16(int(brightness))
while True:
read_distance()
utime.sleep(0.5)
This sensor is used to detect the presence of an object moving in its radius of view. The following Micropython code is used to use a PIR sensor to detect motion and display status on an oled and use a buzzer to alert the user.
from machine import Pin
import utime
#initialize the OLED display
spi = SoftSPI(baudrate=500000, polarity=1, phase=0, sck=Pin(14), mosi=Pin(13), miso=Pin(12))
dc = Pin(6) # data/command
rst = Pin(5) # reset
cs = Pin(15) # chip select, some modules do not have a pin for this
display = ssd1306.SSD1306_SPI(128, 64, spi, dc, rst, cs)
#initialize the green led and buzzer
buzzer=Pin(0,Pin.OUT)
LED2=Pin(1,Pin.OUT)
PIR=Pin(16,Pin.IN,Pin.PULL_DOWN)
while True:
display.fill(0)
if PIR.value()==1:
display.text(" Motion Detected ! ! ",1,1,1)
buzzer.value(1)
LED2.value(0)
else:
display.text("NO Motion Detected ! ! ",1,1,1)
LED2.value(1)
buzzer.value(0)
utime.sleep(0.5)
A video of this sensor in action using esp32 is as shown below :
Here, we'll apply all that we have learnt to build a project that senses the presence of an object moving and measures its distance.
Components used include :
from machine import Pin,PWM
import utime
#Initilizing the OLED
spi = SoftSPI(baudrate=500000, polarity=1, phase=0, sck=Pin(14), mosi=Pin(13), miso=Pin(12))
dc = Pin(6) # data/command
rst = Pin(5) # reset
cs = Pin(15) # chip select, some modules do not have a pin for this
display = ssd1306.SSD1306_SPI(128, 64, spi, dc, rst, cs)
#Initializing the Ultrasonic and led2(Red led)
Trig=Pin(3,Pin.OUT)
Echo=Pin(2,Pin.IN)
LED2=PWM(Pin(26))
LED2.freq(1000)
LED2.duty_u16(0)
#Initializing the PIR sensor and led1(Green led)
PIR=Pin(16,Pin.IN,Pin.PULL_DOWN)
LED1=Pin(0,Pin.OUT)
#Function for detecting motion
def motion():
display.fill(0)
LED1.value(PIR.value())
if PIR.value()==1:
display.text("Motion Detected ",1,1,1)
else:
display.text("No Motion! ",1,1,1)
utime.sleep(0.5)
#Function for measuring distance
def read_distance():
Trig.value(0)
utime.sleep_us(2)
Trig.value(1)
utime.sleep_us(5)
Trig.value(0)
while Echo.value()==0:
Time_taken_go=utime.ticks_us()
while Echo.value()==1:
Time_taken_received=utime.ticks_us()
timeTaken=Time_taken_received-Time_taken_go
distance=((0.0343*timeTaken)/2)
brightness=(65550/150)*distance
LED2.duty_u16(int(brightness))
display.fill(0)
display.text("The distance object is "+distance+" cm away ",1,1,1)
while True:
read_distance()
motion()
utime.sleep(1)
A link of this from wokwi of this project is : Module_2 project.